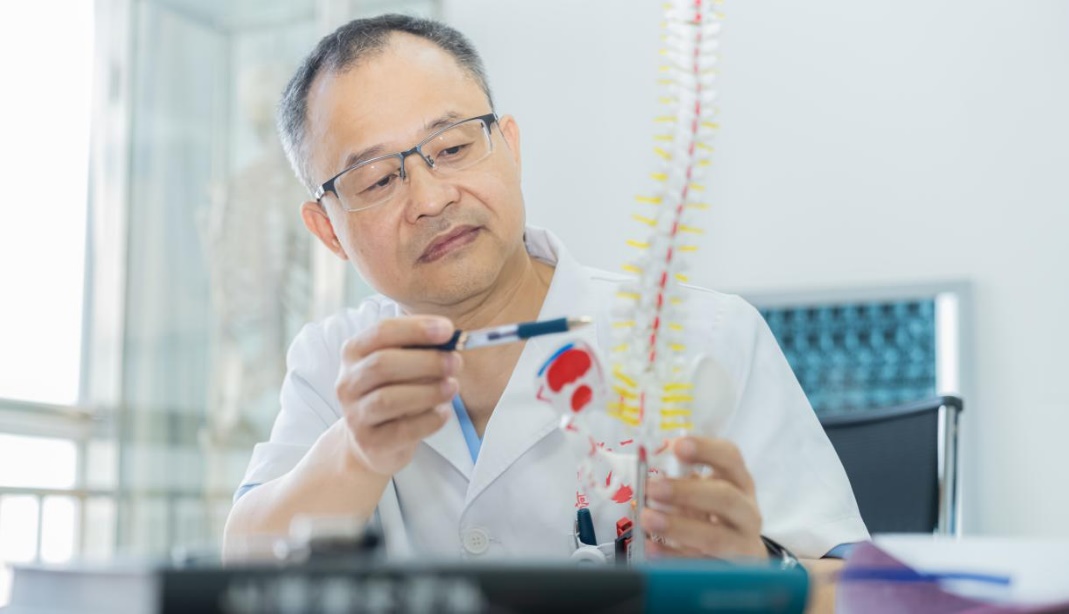
美国宇航局洞察力的机器人臂将使用它的勺子将航天器的热探针或“摩尔”固定在其洞的墙壁上。
美国宇航局的Insight Lander,这是探索火星深层内部的使命,将其机器人臂定位在过去的周末,以帮助宇宙飞船的自锤热探测。被称为“鼹鼠”,探头已经无法挖出超过约14英寸(35厘米),因为它开始于2019年2月28日埋入地面。
机动正在准备策略,在几周内尝试,称为“钉扎”。
“我们将尝试将勺子的一侧压在鼹鼠上,将其固定在其洞的墙壁上,”加利福尼亚州帕萨迪纳帕萨迪纳的喷气机推进实验室的Insight副校长Sue Smrekar说。“这可能会增加足够的摩擦力,以便在鼹鼠锤击恢复时继续前进。”
摩尔上的额外压力是否会弥补独特的土壤仍然是一个未知的。
设计用于挖洞,地下16英尺(5米),记录从行星内部逸出的热量,鼹鼠需要从周围土壤中摩擦以便挖掘:没有它,从自动锤击动作中反冲导致它只是反弹到位,这就是现在发生的任务团队嫌疑人。
虽然JPL管理NASA的Insight使命,但德国航空航天中心(DLR)提供了热探头,这是一种称为热流和物理性质包装(HP3)的仪器的一部分。6月回来,该团队设计了一个帮助热探头的计划。一旦开始挖掘,鼹鼠并不设计被拾取并重新安置。相反,机器人臂移除了旨在使痣稳定的支撑结构倾斜,因为它挖掘到火星表面。

美国宇航局洞察力的机器人臂将使用它的勺子将航天器的热探针或“摩尔”固定在其洞的墙壁上。摩尔是德国航空航天中心(DLR)提供的正式称为热流和物理性质包装或HP3的仪器的一部分。
删除结构允许洞察团队更好地看看它在鼹鼠周围形成的孔。鼹鼠可能撞到了岩石,但是DLR的测试表明,这个问题是土壤,而不是在锤子上落在鼹鼠周围。果然,ARM的相机发现,表面下方似乎是2到4英寸(5到10厘米)的杜兰茨,一种粘稠的土壤比其他火星任务遇到的任何粘土,与土壤不同,鼹鼠被设计为。
“我们所知道的土壤是我们在图像中看到的东西,洞察力送我们,”泰尔曼Spohn,惠普的首席调查员DLR。“由于我们不能将土壤带到鼹鼠身上,也许我们可以通过将摩尔固定在洞内。”
在机器人手臂上使用勺子,球队在夏天戳了七次土壤,努力崩溃。没有这样的运气。坍塌洞不应该花很多力量,但是手臂没有全力推动。该团队尽可能远离着陆器,使航天器的阴影不会影响热探头的温度读数。结果,不打算以这种方式使用的臂必须伸出并按住一定角度压出,比摩尔更近的力施加得多。
“我们要求手臂在其重量之上发布,”JPL的铅臂工程师亚艾迪特比比尔诺说。“手臂不能像人物一样推着土壤。如果它可以,这会更容易,但这只是我们拥有的武器。“
行星期际救援行动不是NASA的新手。火星探索流浪者团队帮助拯救精神和机会,以上。上来,可行的解决方案需要非凡的耐心和规划。JPL具有展望的工作复制品来练习臂运动,并且它也具有热探头的工作模型。
除了钉扎外,该团队还在测试一种技术,以便在最初打算工作的方式使用勺子:刮到洞中的土壤,而不是试图压缩它。在不久的将来从洞察力下降的原始图像中,这两种技术都可能可见。